
News
Successfully Delivered | NDT robotic tactile sensor
2024-01-18Humanoid robot is recognized as the most complex product form in the robot category. It has a human-like appearance and limb structure, helping humans complete more diverse, complex and delicate tasks.
At the same time, people are more receptive to humanoid shapes, making it easier to establish emotional links and interact with each other. Broad application prospects and huge business opportunities have made humanoid robots receive widespread attention and popularity from the market. With the continuous advancement of robot-related underlying technologies, it is foreseeable that humanoid robots will gradually develop and benefit thousands of families.
Robotic Perception System
The perception system is the basis for the working ability of humanoid robots. Through the simultaneous cooperation of perception and decision-making systems, humanoid robots can accurately perform tasks.
Among them, tactile perception has become the core perception ability of humanoid robots because it is the only perception of contact between robots and the physical world. The robotic tactile sensor can obtain tactile information such as the weight, hardness, and deformation of the object to ensure the stability and safety of the work. Especially when the robot's vision is blocked or in complex environments, tactile perception can achieve more reliable execution results.

Introduction of NDT robotic tactile sensor
Sensor Type: resistance strain gauge
Detection principle: When subjected to external force, the sensor undergoes slight deformation and the resistance value changes. A differential signal is output through the Wheatstone bridge to achieve accurate force and position detection.
Functions: It can detect the point of force and the force value when the robot finger touches an object.
Features:
High sensitivity: can identify changes in force of 0.05N
Easy to install: NDT provides knuckle modules with integrated tactile sensors, which can be directly installed to replace the original knuckles, making it easier to upgrade the first-generation humanoid robot.
Durable: Tens of millions of life tests


Function of Dexterous Robot Hand
1. Hand pressure distribution perception
The sensor can provide information on the pressure distribution of the robot's fingers when it touches an object, helping the robot to sense the weight, shape, etc. of the object and adaptively adjust the best finger grasping method and strength.
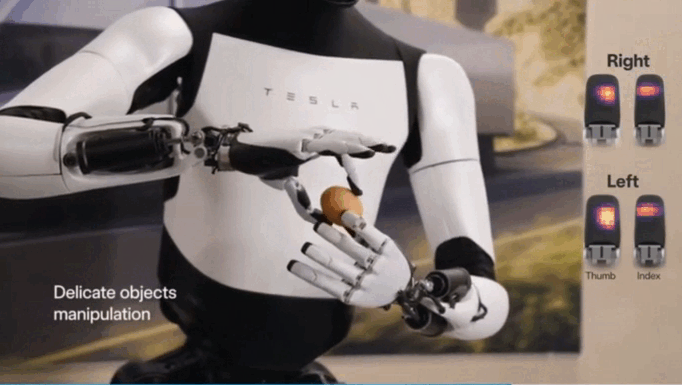
*The photo is from Tesla and do not refer to cooperative customer.
2. Vibration perception
Detect the vibration frequency and amplitude of objects to help the robot judge the motion status of the object and identify machine failures or instability.
3. Temperature perception
For robots that need to handle high-temperature or low-temperature objects, the NDT tactile sensor can provide temperature data of the contact object by integrating a temperature sensor, effectively avoiding damage to the robot and safety accidents.
With more than ten years of accumulated technology and experience, and intensive research in recent years, NDT has successfully delivered robot tactile sensors in batches. Looking forward to the release of customer humanoid robot products and welcome more customers to learn about NDT tactile sensor solutions!
